Invisible City
Simulating Movement, Perception, and Memory
Simulating Movement, Perception, and Memory


2025
Spatial Cognition, Agent Simulation, Reinforcement Learning, Computer Graphics
Python, Grasshopper, Unity, C#, HLSL/ShaderLab
Exhibited at the 18th International Conference on Interactive Digital Storytelling (ICIDS) Art Exhibition, Dec 2025, St Julian, Malta.
Presented at PAMLA 2025, Nov 2025, San Francisco, CA.
The traveler recognizes the little that is his, discovering the much he has not had and will never have.
– Italo Calvino, Invisible Cities
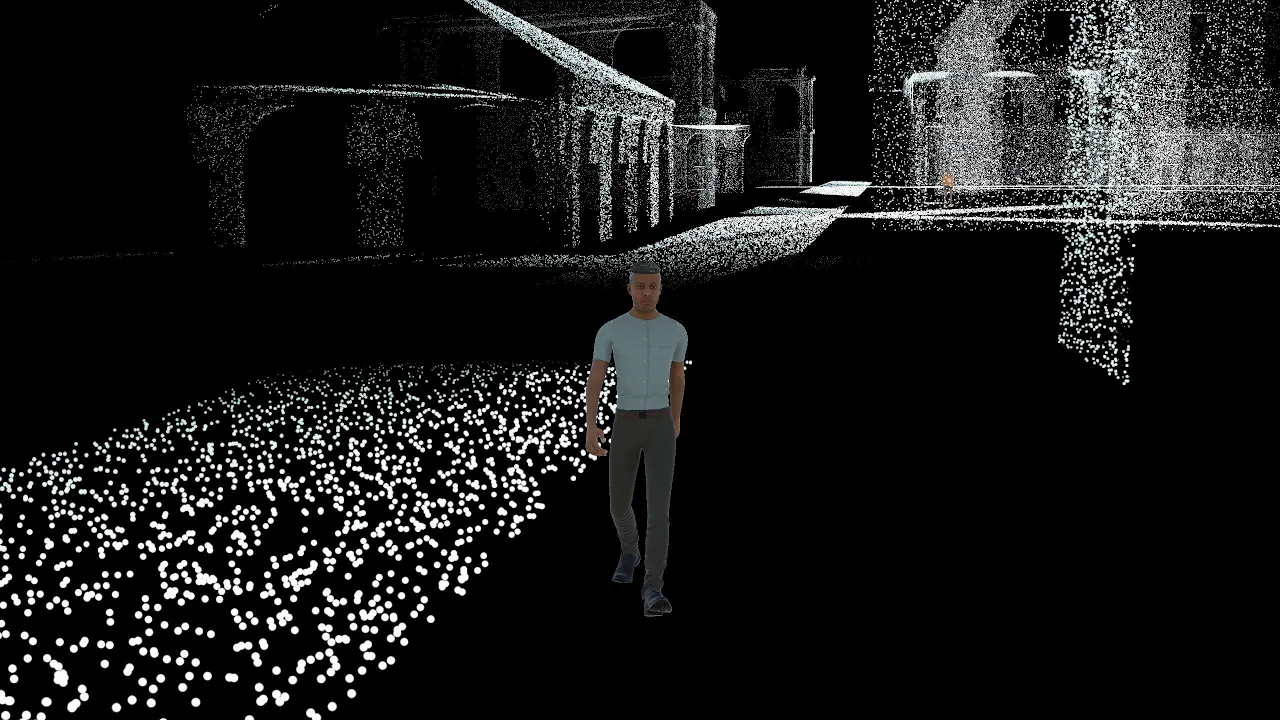
Invisible City is an interactive digital simulation that visualizes how spatial memory forms, distorts, and fades through movement and perception in a point-cloud city. In the simulation, the player and agents together navigate a procedurally generated environment whose visibility changes with memory: spaces that are seen remain vivid, while those forgotten recede into ghostly traces. The city itself is a dynamic collective memory, with its form continuously shaped by the accumulated perceptual history of its inhabitants.
The simulation features three types of agents, each trained through reinforcement learning to embody a distinct mode of movement inspired by philosophical models of urban experience: the flâneur drifts with curiosity (Walter Benjamin), the walker moves with strategic intent (Michel de Certeau), and the dweller cultivates presence through rootedness (Martin Heidegger). These modes are not only behavioral but epistemological, proposing different ways of navigating, perceiving, and remembering the city. Through their interaction, the simulation becomes a polyphonic system of cognition and forgetting.








Simulating Movement, Perception, and Memory
2025
Spatial Cognition, Agent Simulation, Reinforcement Learning, Computer Graphics
Python, Grasshopper, Unity, C#, HLSL/ShaderLab
Exhibited at the 18th International Conference on Interactive Digital Storytelling (ICIDS) Art Exhibition, Dec 2025, St Julian, Malta.
Presented at PAMLA 2025, Nov 2025, San Francisco, CA.
The traveler recognizes the little that is his, discovering the much he has not had and will never have.
– Italo Calvino, Invisible Cities
Invisible City is an interactive digital simulation that visualizes how spatial memory forms, distorts, and fades through movement and perception in a point-cloud city. In the simulation, the player and agents together navigate a procedurally generated environment whose visibility changes with memory: spaces that are seen remain vivid, while those forgotten recede into ghostly traces. The city itself is a dynamic collective memory, with its form continuously shaped by the accumulated perceptual history of its inhabitants.
The simulation features three types of agents, each trained through reinforcement learning to embody a distinct mode of movement inspired by philosophical models of urban experience: the flâneur drifts with curiosity (Walter Benjamin), the walker moves with strategic intent (Michel de Certeau), and the dweller cultivates presence through rootedness (Martin Heidegger). These modes are not only behavioral but epistemological, proposing different ways of navigating, perceiving, and remembering the city. Through their interaction, the simulation becomes a polyphonic system of cognition and forgetting.
Simulating Movement, Perception, and Memory
2025
Spatial Cognition, Agent Simulation, Reinforcement Learning, Computer Graphics
Python, Grasshopper, Unity, C#, HLSL/ShaderLab
Exhibited at the 18th International Conference on Interactive Digital Storytelling (ICIDS) Art Exhibition, Dec 2025, St Julian, Malta.
Presented at PAMLA 2025, Nov 2025, San Francisco, CA.
The traveler recognizes the little that is his, discovering the much he has not had and will never have.
– Italo Calvino, Invisible Cities
Invisible City is an interactive digital simulation that visualizes how spatial memory forms, distorts, and fades through movement and perception in a point-cloud city. In the simulation, the player and agents together navigate a procedurally generated environment whose visibility changes with memory: spaces that are seen remain vivid, while those forgotten recede into ghostly traces. The city itself is a dynamic collective memory, with its form continuously shaped by the accumulated perceptual history of its inhabitants.
The simulation features three types of agents, each trained through reinforcement learning to embody a distinct mode of movement inspired by philosophical models of urban experience: the flâneur drifts with curiosity (Walter Benjamin), the walker moves with strategic intent (Michel de Certeau), and the dweller cultivates presence through rootedness (Martin Heidegger). These modes are not only behavioral but epistemological, proposing different ways of navigating, perceiving, and remembering the city. Through their interaction, the simulation becomes a polyphonic system of cognition and forgetting.